F1 gearboxes
date: May 19 2026
Stumbled upon this wonderful video about modern F1 gearbox:
https://www.youtube.com/watch?v=8E1ecqCo6gM
Figured it’s a good time to learn more about gearboxes, drive train, and transfer of mechanical energy in general.
interesting bits about F1 gearbox
the core of my interest was about the fact that F1 gearboxes have an instant in time where two different gears are engaged. which, afaik, usually results in a lock gearbox and internal damage or destruction of it under all the forces - but not this gearbox. also there is a very real incentive to design it in such a way.
first, quick description of what’s going on here.
the gearbox sits between the engine and the differential. its job is to set the ratio between input RPM (engine) and output RPM (driven into the diff, then the wheels). That ratio defines the trade between torque and road speed at any given engine RPM.
a bit AI sloppy, but conceptually this is accurate enough
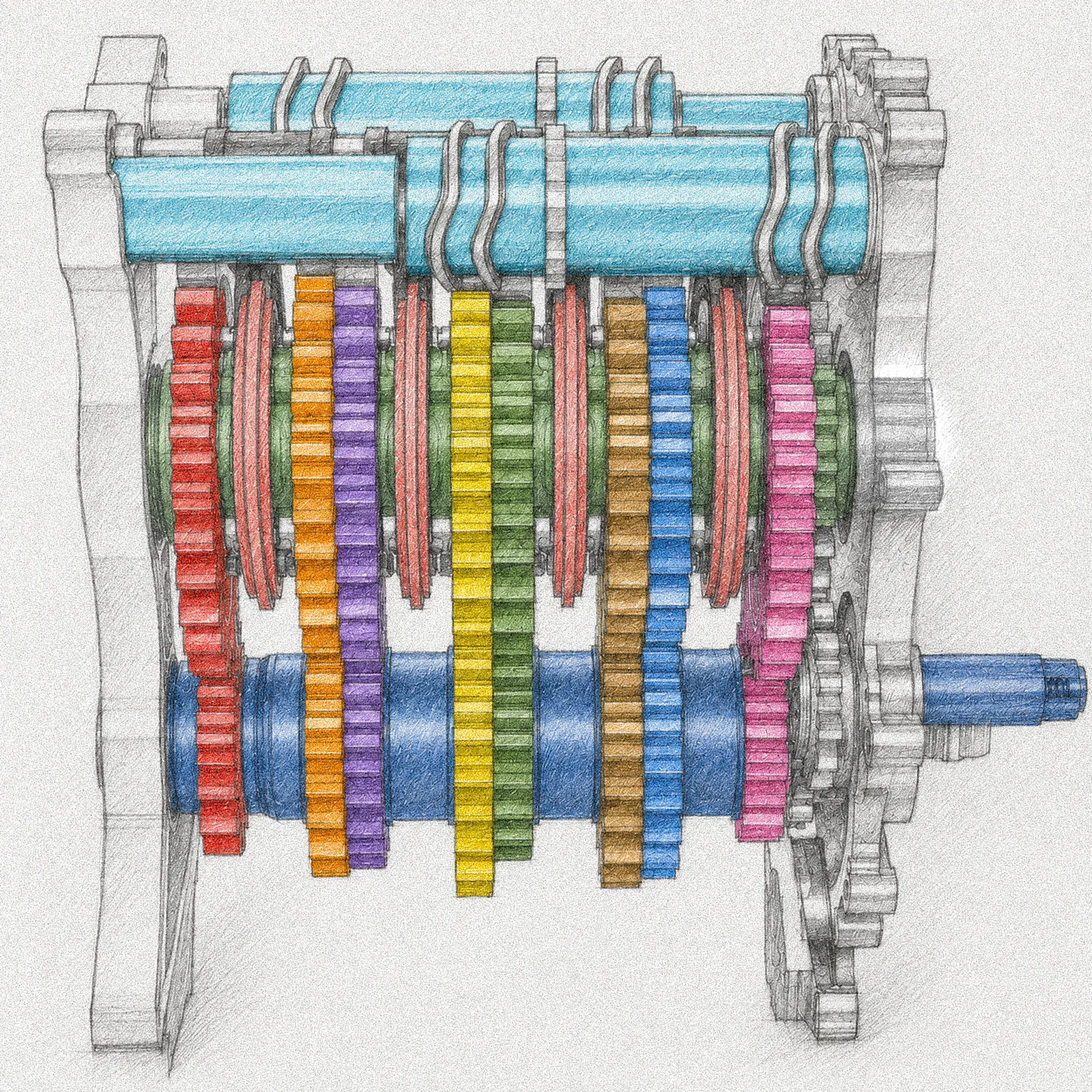
on the picture you see:
- input shaft - blue - driven by the engine, carrying the driver gears fixed to it
- output shaft - dark green - feeding the differential, carrying the driven gears that spin freely on needle bearings around it
- gear pairs - there are 8 pairs. different pairs, different gear ratios. each driver meshing permanently with its driven counterpart (constant mesh, all pairs always spinning whenever the engine is running)
- dog rings (also called engagement sleeves) - dark red discs on output shaft - splined to the output shaft so they always rotate with it, and able to slide axially to lock one specific driven gear to the shaft via interlocking dog teeth
- selector drums (also called barrels) - cyan at the top - with helical tracks machined into them. Rotating a drum drives selector forks that ride in those tracks, and the forks push the dog rings into or out of engagement. this particular design uses two drums splitting responsibility across the gears, which is what enables the seamless shift mechanism.
how a shift actually goes
in neutral, the input shaft spins, all driver gears spin with it, and all driven gears are dragged along on their bearings around a stationary output shaft. No dog ring is engaged, so nothing locks the output to any specific ratio.
engaging a gear means sliding its dog ring sideways until its dog teeth bite into corresponding dogs on the driven gear’s hub. now that gear is locked to the output shaft and the chosen ratio is driving the wheels. all the other driven gears keep spinning at their own ratios on their bearings, doing no useful work.
to shift from 4th to 5th in a normal sequential box you would release 4th’s dog ring first, then engage 5th’s. but, here is the important part - that gap is the torque interruption for a few hundreds of milliseconds the engine is disconnected from the wheels, delivering no power. (~100s of ms for road cars, old f1 gearboxes would have this in ~10s of ms)
this therefore results in loss of energy and power delivered to the wheels, and hence lower speed, and lower acceleration, or deceleration under all the drag forces - unacceptable for a team fighting for every 0.1s on the lap.
so, in an F1 seamless box the order is inverted. 5th engages first, while 4th is still loaded. for a brief moment both gears are clamped to the output shaft. then the 4th gear disconnects. this results in a seamless transition in which engine is perfectly coupled to the drive train through the gearbox and delivering the power to the wheels continuously as the active gear changes.
why this does not destroy the gearbox
two different ratios on the same output shaft is a real conflict. 5th wants the output to spin at one speed for a given engine RPM, 4th wants it slower. in a conventional dog ring with symmetric, bidirectional teeth, neither side can release while loaded, so the result is a locked driveline or sheared dogs.
the trick is asymmetric, ratcheting dog teeth. the faces are profiled so the dogs transmit torque in one direction (the drive direction) but can pop apart axially if the gear they are engaged with starts being overrun.
on an upshift, 5th engages while 4th is still driving. because 5th is the taller gear, engaging it forces the output shaft to spin slightly faster than 4th wants to drive it. 4th’s driven gear is now being overrun by its own output shaft, which unloads its dog teeth and lets the ratcheting geometry kick them out automatically. the selector fork then completes the disengagement with no torque ever passing through a dead zone.
the downshift is harder. during engine braking the torque path is reversed, running from tires through the gearbox back into the engine. that means the outgoing gear’s dogs are loaded in the opposite direction from a normal pull, and the same ratcheting geometry that pops them free on overrun will refuse to release them under deceleration load. so the box can’t just “let 5th fall out” the way it did on the upshift.
the workaround is engine torque management by the ECU. immediately before 4th’s dog ring engages, the ECU cuts ignition and blips throttle to drop the engine-braking torque to near zero for a few milliseconds. with 5th’s dogs momentarily unloaded, 4th slams home. once 4th is bearing load, the new ratio mechanically pulls engine RPM up to its equilibrium and 5th’s dogs ratchet free in the now-correct direction.
also can learn about older seamless shift gear design from this quick Honda R&D paper